Figure 1: European aerial robotics platforms (Image creit: University of Sevilla/AICIA)
Aerial Robotics could be the only solution to reach otherwise inaccessible sites to take images and collect information in natural disasters, environment protection, agriculture or in the maintenance of utilities and plants without stopping the production, thus saving millions of euros.
The interest in Aerial Robotics has grown significantly in recent years as can be seen when considering the new industrial applications, the number of research projects, the growing number of events and sessions in the Conferences, and the appearance in the media.
The development of new aerial platforms with improved performance and safety conditions has contributed significantly. Today, platforms range from very big aerial vehicles with tens of meters wingspan to micro and even nano vehicles with grams of weight and millimeters wing-span.
Aerial robots are now using new navigation sensors, actuators, embedded control and communication components, including miniature components with significant capabilities. The reliability and safety of the aerial platforms have also been improved. Thus, in addition to electrical helicopters and fixed wing aircrafts with an increased payload, multi-rotor systems (quadcopters, hexacopters or octocopters) and coaxial configurations have been developed contributing to the wide use of aerial platforms for indoor and outdoor experimentation at a relatively low cost.
Figure 1 shows some European platforms developed in previous or running projects, but many others can be presented including also fixed wing and morphing configurations.
Many applications still requires the development of new control, navigation and guidance technologies for accurate positioning and trajectory tracking cancelling perturbations, such as wind gust. In many aerial robotics applications rotary wing aerial platforms such as helicopters and multi-rotor systems are preferred due to vertical takeoff and landing and hovering capabilities. However, time of flight is currently a significant limitation in these platforms that requires new platforms, eventually combining rotary and fixed wing configurations, as well as new energy generation technologies, in-flight refueling, and other methods for energy harvesting from the environment.
In several of the above mentioned technologies, a biological inspiration could be useful to generate new aerial robot configurations and behaviours.
Furthermore, aerial robotics requires the development of perception and planning capabilities able to deal with complex 3D problems. Thus, for example, general real-time 3D perception of the environment from on-board sensors is difficult to achieve in small aerial robots. The computation of 4D trajectories (including time) in complex environments, taking into account obstacles and other aerial robots (multi-robot problems), is also relevant because of the safety and constrained time of flight of the aerial robots.
Increasing reliability and safety of aerial robots is a main issue. These include new methods and technologies dealing with components and functional redundancies, obstacle detection and avoidance, fault detection and recovery, and emergency manoeuvering and landing. Most navigation and guidance strategies are based on satellite positioning systems. However, the reliability of these systems is a critical issue. Satellite occlusions, multi-paths and other radio communication problems lead to the need of supplementing, or substituting, the satellite positioning systems with alternative sensors, which is mandatory indoors and other GPS denied environments. In this context, the application of image processing and range sensors in guidance, navigation and control of aerial robots have been growing significantly in the last years including Simultaneous Localization and Mapping (SLAM).
The study of interactions between humans and aerial robots is also a challenge with important practical relevance in improving reliability and safety. This impacts not only the design of new haptics, multimodal interfaces and telerobotic technologies, but also the need of new aerial robots minimizing the damage to humans and objects in the environment in case of crashing.
The flight and payload limitations of affordable aerial robots are still significant constraints for the development of many applications. The multiple aerial robot approach increases the special coverage, improves the reliability due to redundancies, makes possible the simultaneous intervention in different places, and leads to the use of teams of aerial robots that can exploit the information derived from multiple disparate points to build models. Last but not least, having a team with multiple heterogeneous aerial vehicles offers additional advantages due to the possibility of exploiting the complementarity of vehicles such as helicopters, airplanes and airships.
The FP5 COMETS project, carried out from 2002 to 2005, demonstrated experimentally, for the first time in Europe, the interest of a team of multiple aerial robots in applications such as the autonomous detection and monitoring of forest fires. In this case, the robotic helicopters flew near the fire computing the fire front position, the propagation velocity and the height of the flames, at the same time that an airship, flying higher, built terrain maps and performed as communication relay providing information to the ground control station as shown in Figure 2.
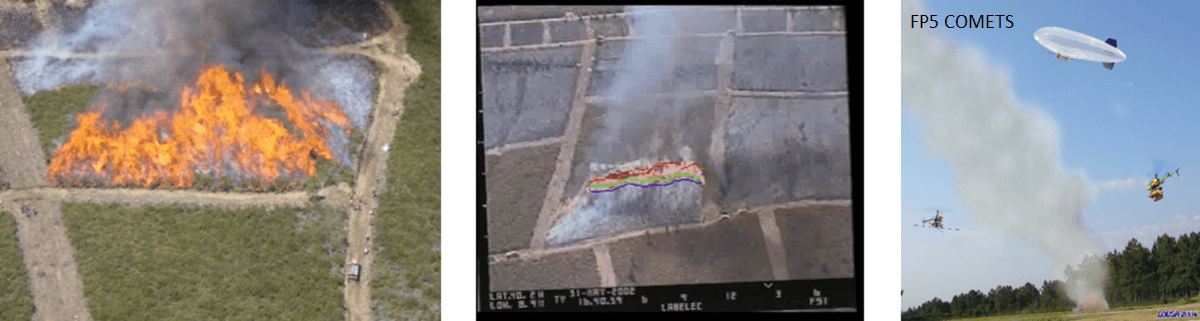
Figure 2: Forest fire monitoring by means of unmanned aerial vehicles in the COMETS project (Image credit: University of Sevilla/AICIA)
The technologies developed in COMETS, and other research projects tested with experimental fires, have been transferred to industries. Today aerial robotic technologies are being used to monitor forest fires in operational conditions. However, the joint operation with other manned aircrafts is a main issue that still needs the development of coordination methods and technologies to maintain safety. Thus, the application is more straightforward by night when conventional fire-fighting aerial means are not operating. Moreover, the technologies developed in COMETS are currently applied by a company with a system on-board a conventional helicopter. The system is autonomous and the pilot, who is the only person on-board, only needs to activate the system to provide automatically the location of the fire and the propagation parameters to the ground station helping the forest fire extinguishing.
In recent years aerial robots have evolved to perform other works. They can transport and deploy loads individually or jointly when the payload of a single robot is not enough as in the AWARE FP6 project (2006-2009). AWARE demonstrated by the first time worldwide the transportation of a load jointly by three helicopters, deploying the load on the top of a building and being able to withstand wind gusts of the same value as the maximum speed of the helicopters. Figure 3 shows photographs of the demonstration.
![]()
Figure 3: AWARE demonstration in May 2009 (Image credit: University of Sevilla/AICIA)
The AWARE project also demonstrated the cooperation of the helicopters with wireless sensors and actuator networks in disaster management, cinematography, and industrial inspection. AWARE generated several commercial products including the first fully electrical robotic helicopter capable of carrying 6 kgs of high resolution cameras that has been applied in cinematography, inspection of wind energy generators (see Figure 4) and agriculture (see Figure 5). Another result of the project is a wireless sensor network application, that integrated nodes transported by helicopters and by fire fighters, that was also transferred to a company.
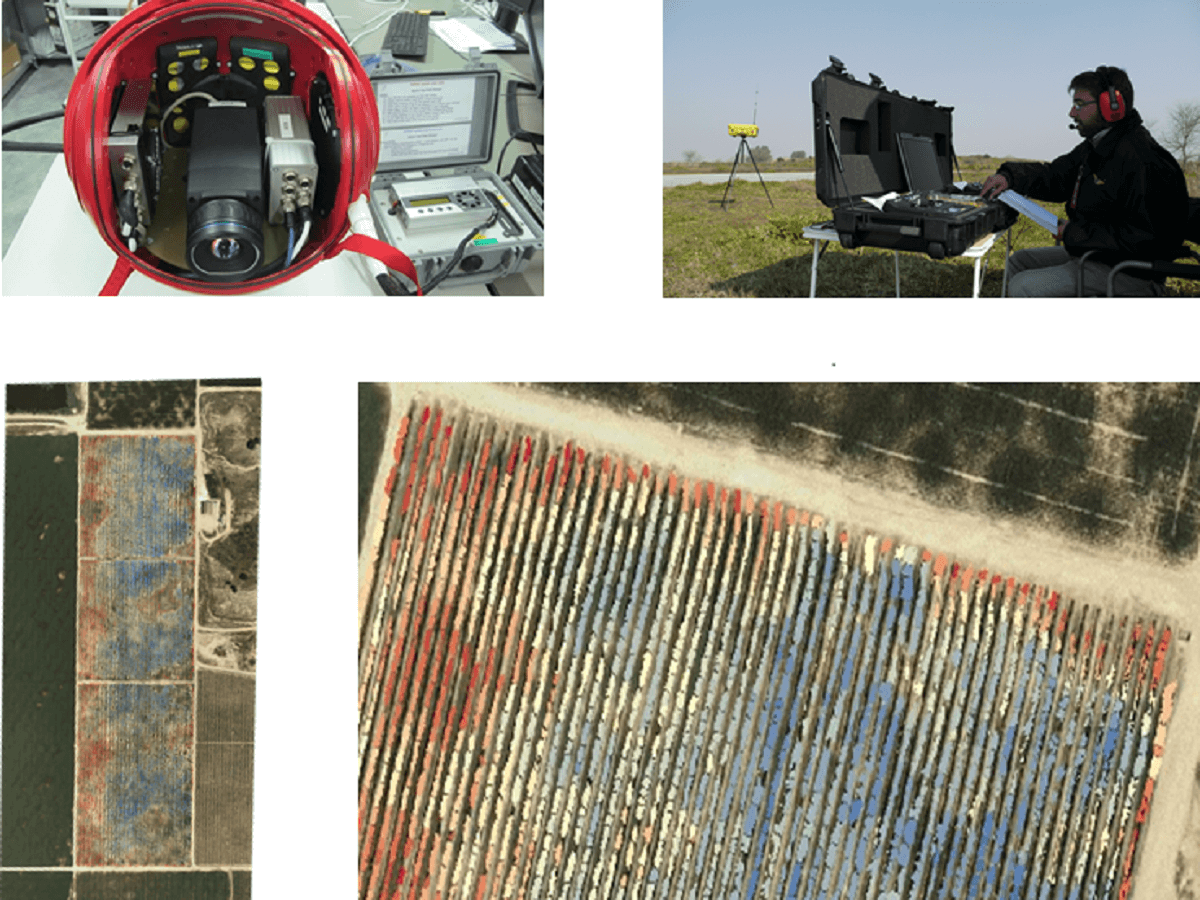
Figure 5: Precision agriculture application: water stress monitoring, and detection of nutrient deficiencies in a vineyard (Image credit: University of Sevilla/AICIA)
More recently, aerial robotic manipulation emerged as a new promising field. Aerial manipulation opens many new applications to take benefit of the versatility and degrees of freedom of the aerial robots, comprising the aerial platform and the manipulator device, to perform manipulation tasks in otherwise inaccessible, or very costly to access, sites to perform activities such as maintenance, transportation, assembly, and construction of structures.
The FP7 ARCAS project on aerial robotics cooperative assembly systems, started in 2011, also led by Professor Ollero, and has developed the world first multi-functional aerial robots with 6 and 7 degrees of freedom arms, including multi-rotor systems (see Figures 6 and 7) and helicopter system with the Light Weight Robot Industrial arm (see Figure 8)
ARCAS have already demonstrated aerial visual-guided grasping, assembly of aerial structures (see Figure 9), and transportation (see Figure 10), and is also developing cooperative robotic technologies for on-orbit space applications. The results of ARCAS will be applied to industrial inspection and maintenance. Other potential applications of the ARCAS manipulation capabilities include the installation of antennas in inaccessible locations or platforms in rescue operations.
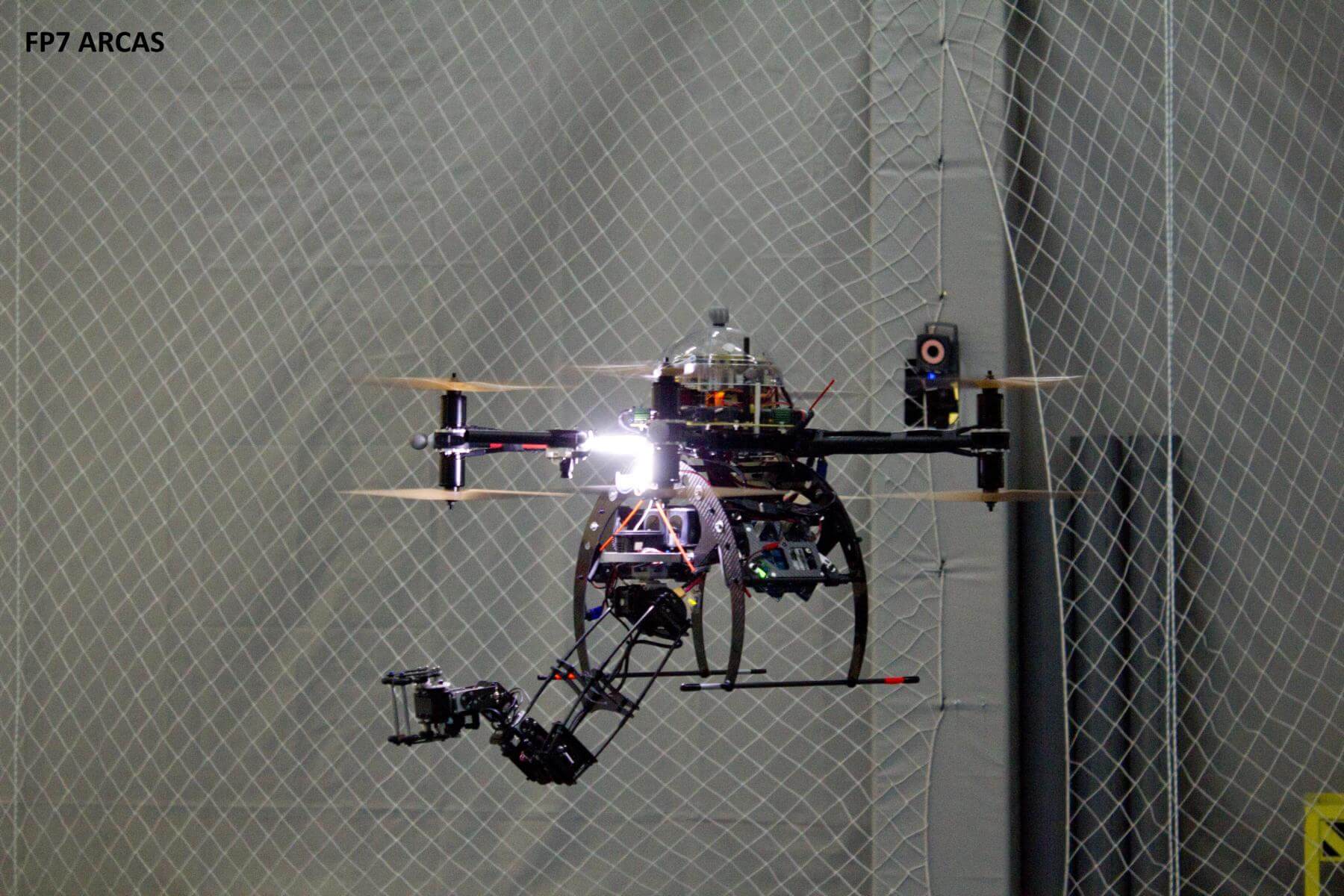
Figure 6: Multi-rotor platform with 6 Degrees of Freedom Very Light Arm (Image credit: University of Sevilla/AICIA)
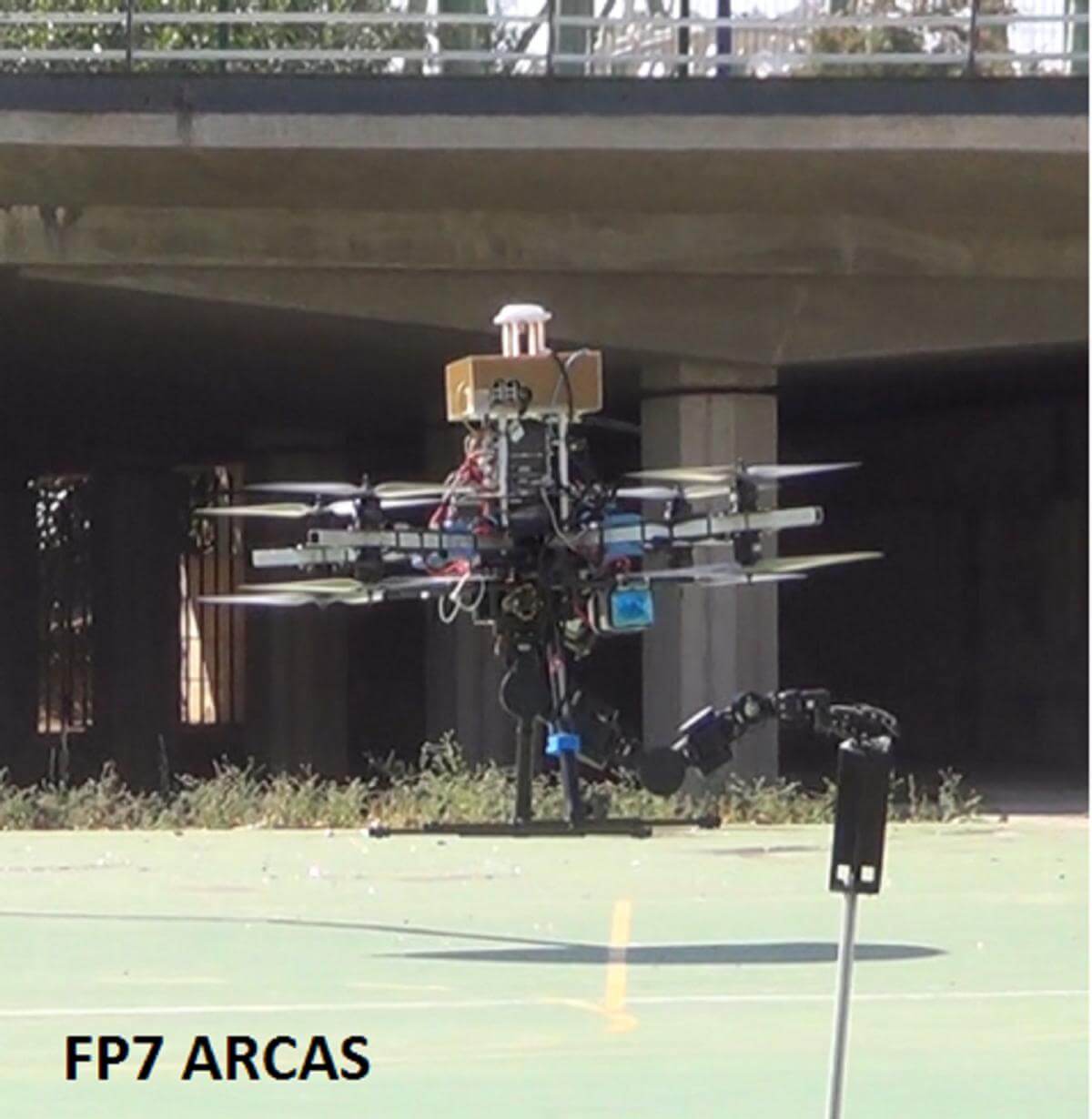
Figure 7: Grasping with multi-rotor platform with 7 Degrees of Freedom Arm in the ARCAS project (Image credit: University of Sevilla/AICIA)
Figure 7: Grasping with multi-rotor platform with 7 Degrees of Freedom Arm in the ARCAS project (Image credit: University of Sevilla/AICIA)

Figure 9: Structure assembly with aerial manipulator in the ARCAS project (Image credit: University of Sevilla/AICIA)
![]()
Figure 10: Multi-rotor aerial robot with 7DoF arm in transportation tasks (ARCAS Project) (Image credit: University of Sevilla/AICIA)
Video: “The ARCAS Project” on YouTube
Check the aerial robots gallery for further images.
Acknowledgments and Contact:Prof. Anibal Ollero
University of Sevilla/AICIA
Grupo Robótica Visión y Control
Camino de los Descubrimientos
s/n 41092 Seville
Spain
aollero@cartuja.us.es