
Walking excavators of Menzi Muck (Image credit: ETH Zurich)
Legged robots are a great promise for future machines to achieve unperceived locomotion capabilities in all kinds of challenging terrain. Inspired by the mechanical principles of human and animal locomotion, a group of researchers at ETH Zurich started creating a new generation of legged robotic systems and the underlying locomotion control technology for running and climbing over rough grounds (figure 1). (In contrast to traditional machines, they are built upon selected compliant elements resulting in precise torque controllability, mechanical energy recuperation, and high impact robustness which makes these robots very well suited for all kinds of real world applications.)
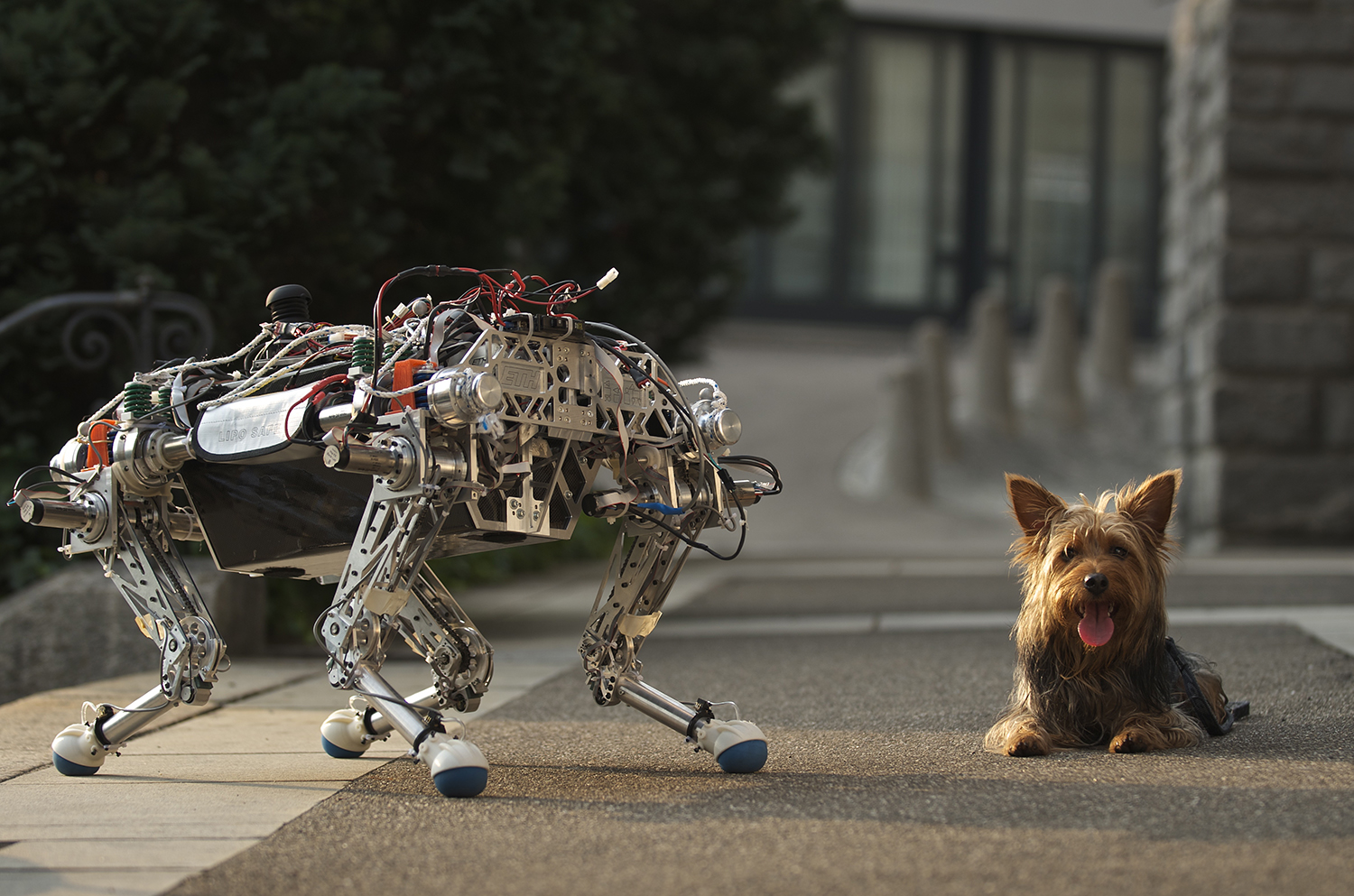
StarlETH is a quadruped robot with the ability to run and climb over rough grounds (Image credit: ETH Zurich)
Supported by CTI (Swiss Commission for Technology and Innovation), the developed control and state estimation strategies are today being transferred to walking excavators of Menzi Muck (figure 2). This enables an optimal contact force distribution similar to the robotic dogs, which significantly improves safety and usability of these highly versatile large scale machines.
Video: “Legged Robots at the ETH Zurich” on YouTube
Further videos provided by the ETH Zurich can be seen here.
Check the legged robots gallery for further images.
Acknowledgments and Contact:Prof. Dr. Roland Siegwart
ETH Zurich
CLA E 14.2, Autonomous Systems Lab
Institute of Robotics and Intelligent Systems
Tannenstrasse 3
8092 Zürich
Switzerland
Phone: +41 44 632 23 58
Fax: +41 86 079 214 49 27
rsiegwart@ethz.ch
www.asl.ethz.ch