Show details
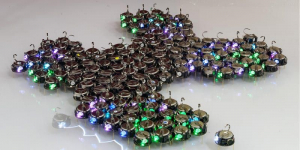
Robot Swarms in Our Cities
|
‘Escape Room: Swarm Escape!’, an immersive project with Bristol Robotics Laboratory, explores one possible future use of robot swarms in our city. Now we’d like to hear from you. How would you use a robot swarm differently? What robot swarm applications would you like to see in your city? What are your concerns? Join researchers from the Hauert Lab at the University of Bristol and the Bristol Robotics Laboratory to help define the role of robot swarms in future cities. You do not need to have participated in the escape room for this session. This event will discuss potential uses of robot swarms in our future cities as well as their possible benefits and risks. It will start with an explanation of what swarm robotics is, then the researchers will talk about the feedback they’ve had from the ‘Escape Room: Swarm Escape!’ sessions. You’ll then get a chance to talk to the researchers and ask any questions you have about swarm robotics, and talk about the ways you would and wouldn’t like to see robot swarm applied. |
|
Target audience General public |
|
University of Bristol & Bristol Robotics Laboratory
Sabine Hauert Sabine.Hauert@brl.ac.uk 0117 3315602 |
|
Watershed
Canon's Road 1 BS15TX Bristol United Kingdom |
13.11.2019 - 14.11.2019 | 09:00 - 17:00
RoboSoft: software engineering for robotics
london, United Kingdom
Show details
|
RoboSoft is a two-day event that will bring together researchers working on software engineering for robotics, developers working on the next generation of robotic systems in various areas of application, and regulation authorities interested in safety of robotic systems. RoboSoft provides a platform to establish software engineering for robotics as an important discipline in computer science and electronic engineering. The objective is to establish a common understanding of the challenges that need to be addressed to ensure that results are relevant to industrial practice and regulation. The global market for robotics and autonomous systems is predicted to grow significantly in the coming years. However, a limiting factor for many applications is safety, where software development poses a key challenge. The robotics community has recognised importance of software engineering. Model-based engineering has been applied to requirements and architectural modelling and specialised, while simulation has a variety of commercial and academic tools. Several middleware systems provide conceptual insulation for deployment, from low-level programming of particular robotic platforms, and several domain-specific languages are available that focus on programming and simulation. Applications of general-purpose formal techniques have shown they can add value to verification. Integration, abstraction, specialisation and automation need to be addressed to lower costs and achieve scalability and relevance to industry and regulators. As an outcome of the event, RoboSoft will publish a summary and identify a research agenda. |

14.11.2019 - 22.11.2019 | 16:00 - 18:00
Hack a Robot – Program our robotic museum tour guide
Lincoln, United Kingdom
Show details
14.11.2019 | 18:30 - 21:30
Amazon’s Robotic Warehouses as a Many Robot System
London, United Kingdom
Show details
|
Every day, Amazon is able to quickly pick, pack, and ship millions of items to customers from a network of fulfilment centres all over the globe. Each Amazon warehouse holds millions of items of inventory, most customer orders represent a unique combination of several items, and many orders need to be shipped within a couple hours of being placed to meet delivery promises. This would not be possible without leveraging cutting-edge advances in technology. This talk will describe the mobile robotic fleet that powers an Amazon warehouse and delivers inventory shelves to associates, including how we approach the interrelated problems of assigning tasks and planning paths for thousands of robots in dynamic warehouse environments. I will also discuss the Amazon Robotics Challenge in manipulation and grasping, as well as a couple of big open problems in robotic warehousing. Jeremy L Wyatt is Senior Manager Applied Science at Amazon, Robotics AI. His team focuses on using robotics, machine learning, and artificial intelligence to improve processes in Amazon’s fulfilment centres. Jeremy joined Amazon after being Professor of Robotics and Artificial Intelligence at the University of Birmingham. He has published more than 100 scientific articles on robot manipulation, robot task planning, machine learning, machine vision and probabilistic AI. |
19.11.2019 | 18:30 - 20:30
Bristol Women in Robotics networking event
Bristol, United Kingdom
Show details
|
The Bristol Women in Robotics network invites you to its annual event of talks and networking. Registration is necessary as tickets are limited: https://www.eventbrite.co.uk/e/bristol-women-in-robotics-annual-event-tickets-79556253897 |
|
Target audience This is a networking event, open to anyone interested or working in Robotics. |
|
Bristol Women in Robotics network
Dr Antonia Tzemanaki antonia.tzemanaki@brl.ac.uk |
|
Queen's building, University of Bristol
University Walk - BS8 1TR Bristol United Kingdom |
20.11.2019 | 13:30 - 20:00
Bot-Talks - Bristol Robotics Conference
Bristol, United Kingdom
Show details
|
Bot-Talks is a premium conference and networking event based in Bristol. Bot-Talks helps provide SMEs with an overview of robotics and automation with presentations from leading industry experts, a world-leading panel discussion and a networking hall filled with exciting robot demonstrations; all here in the heart of Bristol City Centre. |
|
Target audience Primarily SMEs and start-ups and robot enthusiasts |
|
Bristol Robotics Laboratory
Mark Haley mark.haley@uwe.ac.uk 0117 3286913 |
|
The Watershed
Canon’s Road 1 BS15TX Bristol United Kingdom |

22.11.2019 | 12:30 - 14:00
'Interactive agri-robotics' with Philip Norman (Ross Robotics) and Dr Emmanouil Benetos (Turing Fellow) 'Machine learning for machine listening'
London, United Kingdom
Show details

25.11.2019 | 15:00 - 17:00
Memristive Technologies: from functional oxides to AI on a chip
London, United Kingdom
Show details
|
Abstract Artificial Intelligence (AI) is destined to transform our society, affecting every aspect of our lives. However, a key bottleneck towards the proliferation of the technology is the lack of efficient hardware that will allow us to embed AI everywhere – well beyond the cloud’s reach. Up until now, the processing of data in electronics has relied on assemblies of vast numbers of transistors – microscopic switches that control the flow of electrical current by turning it on or off. Transistors have got smaller and smaller in order to meet the increasing demands of technology, but have nowadays reached their physical limit, with – for example – the processing chips that power smartphones containing an average of seven billion transistors that are only a few atoms wide. A novel functional-oxide nanoelectronic technology known as the memristor, proclaims to hold the key to a new era in electronics and AI, being both smaller and simpler in form than transistors, low-energy, and with the ability to retain data by ‘remembering’ the amount of charge that has passed through them – akin to the behaviour of synaptic connections in the human brain. In his lecture Themis Prodromakis will present the challenges in manufacturing and using such technologies alogn with a few examples on how these can be used in practical applications: from bio-electronic medicines to “AI on a chip” solutions. Biography Themis Prodromakis is Professor of Nanotechnology and Director of the Centre for Electronics Frontiers at the University of Southampton, UK. His work focuses on developing metal-oxide Resistive Random-Access Memory technologies and related applications and is leading an interdisciplinary team comprising 30 researchers with expertise ranging from materials process development to electron devices and circuits and systems for embedded applications. He holds a Royal Academy of Engineering Chair in Emerging Technologies and a Royal Society Industry Fellowship. He is an Adjunct Professor at UTS Australia, visiting Professor at the Department of Microelectronics and Nanoelectronics at Tsinghua University, and Honorary Fellow at Imperial College London. He is Fellow of the Royal Society of Chemistry, the IET and the Institute of Physics and is also Senior Member of the IEEE. He and serves as the Director of the Lloyds Register Foundation International Consortium for Nanotechnology (ICoN: www.lrf-icon.com) and Co-Director of the UKRI Centre for Doctoral Training in Machine Intelligence for Nano- Electronic Devices and Systems (MINDS). In 2015, he established ArC Instruments Ltd that delivers high-performance testing infrastructure for automating characterisation of novel nanodevices in over 16 countries and in 2019 he founded SoneT.ai that is building new power-efficient hardware solutions. |

06.12.2019 | 16:00 - 17:00
IET/UCL Robotics Lecture: Perception for Limbed Robot Locomotion and Manipulation in Complex Environments, Dr. Dimitrios Kanoulas
London, United Kingdom
Show details
|
This talk is organised by UCL Robotics, a cross-faculty initiative to develop a world-leading teaching and research platform in Robotics and Autonomous Systems, UCL Institute of Healthcare Engineering and the Institution of Engineering and Technology. Register on https://www.eventbrite.co.uk/e/ietucl-robotics-lecture-perception-for-limbed-robot-locomotion-and-manipulation-in-complex-tickets-79978071565. Abstract: Attaining animal-like locomotion and manipulation in uncertain environments with sparse foothold and handhold affordances is a largely open problem. New advancements in mechatronics and control have enabled robots with limbs to complete some impressive complex tasks, especially indoors. Moving outdoors, where reliable contacts with unstructured and uncertain environment surfaces are necessary, new perception and planning algorithms are required. This talk will focus on some of our latest perception results for rough terrain locomotion and object/tool manipulation, that were applied on five different robots: a small-size (RPBP), a half-size (COMAN), and three full-size (WALK-MAN, CENTAURO, and COMAN+) humanoids/animaloids, as well as some future directions on mobile manipulation. Short Bio: Since September 2019, Dimitrios Kanoulas is a Lecturer (Assistant Professor) at the University College London (UCL), Department of Computer Science. Before that and until August 2019, he was a senior postdoctoral researcher at the Humanoids and Human-Centered Mechatronics (HHCM) lab of the Department of Advanced Robotics (AVDR) at the Istituto Italiano di Tecnologia (IIT) in Genoa, working with Prof. Nikos Tsagarakis and Prof. Darwin Caldwell on the perception part of the WALK-MAN, CogIMon, CENTAURO, and Pholus projects. He was the perception team leader of the WALK-MAN DRC team during the DARPA Robotics Challenge 2015. In August 2014, he completed his Ph.D. at the Geometric and Physical Computing (GPC) Lab in the College of Computer and Information Science at Northeastern University in Boston, advised by Prof. Marsette Vona (currently at NASA JPL). He started out as a member of the Algorithms and Theory group at Northeastern University in Boston, working on algorithmic game theory for networks, advised by Prof. Rajmohan Rajaraman and Prof. Ravi Sundaram. During the summer of 2012, he completed an internship on vehicle localization at INRIA-Grenoble in France, advised by Prof. Christian Laugier and Dr. Alexandros Makris. In 2008, he received his Diploma in Computer Engineering and Informatics Department (CEID) at the University of Patras in Greece, advised by Prof. Paul Spirakis and Dr. Haralampos Tsaknakis. |
|
Target audience All are welcome! Please register on https://www.eventbrite.co.uk/e/ietucl-robotics-lecture-perception-for-limbed-robot-locomotion-and-manipulation-in-complex-tickets-79978071565. |
|
University College London & Institution of Engineering and Technology (IET)
Helge Wurdemann h.wurdemann@ucl.ac.uk |
|
University College London, Roberts Building G08 Sir David Davies LT
Torrington Place WC1E 7JE London United Kingdom |

06.12.2019 | 16:00 - 17:00
IET/UCL Robotics Lecture: Perception for Limbed Robot Locomotion and Manipulation in Complex Environments
London, United Kingdom
Show details
| Attaining animal-like locomotion and manipulation in uncertain environments with sparse foothold and handhold affordances is a largely open problem. New advancements in mechatronics and control have enabled robots with limbs to complete some impressive complex tasks, especially indoors. Moving outdoors, where reliable contacts with unstructured and uncertain environment surfaces are necessary, new perception and planning algorithms are required. This talk will focus on some of our latest perception results for rough terrain locomotion and object/tool manipulation, that were applied on five different robots: a small-size (RPBP), a half-size (COMAN), and three full-size (WALK-MAN, CENTAURO, and COMAN+) humanoids/animaloids, as well as some future directions on mobile manipulation. |
07.01.2020 | 08:00 - 18:00
Creating our own robot with microbits
London, United Kingdom
Show details
| PGCE Computing Specialism students will create their own robots using micro: bits. |
|
Target audience Trainee teachers |
|
UCL IOE
Yasemin Allsop y.allsop@ucl.ac.uk 07717774030 |
|
UCL IOE
Bedord Way 20 WC1H 0AL London United Kingdom |

22.01.2020 - 22.01.2020 | 08:30 - 18:00
The 4rd Annual IEEE UK and Ireland RAS Chapter Conference
Manchester, United Kingdom
Show details
|
The aim of the annual IEEE UK&I RAS conference to improve the communication of its members and other researchers, young students and industrial professionals who are interested in the activities of RAS in research, development and education, share the knowledge, latest research achievements and technologies in RAS, and promote collaboration and knowledge transformation. Synchronising with the pace of IEEE Robotics and Automation Society, the UK & Ireland RAS chapter addresses the advancement of the theory and practice of robotics and automation engineering and science and of the allied arts and sciences, and for the maintenance of high professional standards among its members. Today, Robotics and Automation Technologies have been widely applied in various areas, such as Extreme & Hazard Environments, Manufacturing, Food Automaiton, Medical Surgery, Healthcare, Agriculture, Urban Search and Rescue, Surveillance, etc. AI technology has played significant roles in the development of RAS. Internet of Robotic Things (IoRT) inspired wider applications of RAS. The value of IoRT has been demonstrated in distributed, heterogeneous robot control paradigms like networked robot systems or robot ecologies, or in approaches such as ubiquitous robotics and cloud robotics that place resource-intensive computation on the cloud. |
12.02.2020 | 15:00 - 16:00
Robotics Forum Seminar - Medical Robots
London, United Kingdom
Show details
|
Abstract The talk will discuss the transition from open, to minimally invasive and non-invasive surgery, and how this necessitates the development of medical robots. The state-of-the art and innovative developments in the field will be presented. Advances in artificial intelligence offer great promise towards automation in robotic surgery, which however pose significant practical, ethical and legal concerns. To this end, novel “human in the loop” approaches based on advanced human-robot interfaces are proposed. Bio George has a background in Mechatronics and Computer Science and is leading the Human-centred Automation, Robotics and Automation in Surgery -HARMS- lab, at the Department of Surgery and Cancer and Hamlyn Centre, Imperial College London. Research at the HARMS lab is underpinned by a Human-Centred paradigm. The main goals of this paradigm can be broadly identified: (a) Patient- and surgeon-specific designs with the aim to minimize and eliminate invasiveness, optimise outcomes, improve ergonomics and promote personalisation; (b) Frugal innovation to provide affordable surgical technologies, allow infrastructure re-purposing and small theatre footprint; (c) Perceptually-enabled functionalities to improve ergonomics, reduce mental fatigue, facilitate automation and increase safety; (d) Enabling technologies able to introduce radical change, and augment performance and capabilities by making robotic surgery attainable and accessible; (e) Disruptive innovation that pushes the boundaries by proposing new paradigms in minimally invasive surgery. |
24.02.2020 | 08:00 - 18:00
A day of coding & Robotics with Ohbot
London, United Kingdom
Show details
| PGCE students will learn to code via Ohbots. |
|
Target audience Trainee teachers. |
|
UCL IOE
Yasemin Allsop y.allsop@ucl.ac.uk 07717774030 |
|
UCL IOE
Bedford Way 20 WC1H 0AL London United Kingdom |