Worthington Sharpe Ltd., as a sponsor of ERL Emergency Robots 2017, will provide one Wing Ground Control Station (GCS) for loan to a selected applicant team.
Providing robust systems to the teams will clearly allow for shifting the focus on cognition, intelligence, and autonomy of the robots.
The teams wishing to borrow the Wing GCS must apply to the ERL consortium, following the procedure set out below. Applications received will be evaluated by the consortium and Worthington Sharpe Ltd. to select the team who will be granted the loan equipment.
The Wing GCS
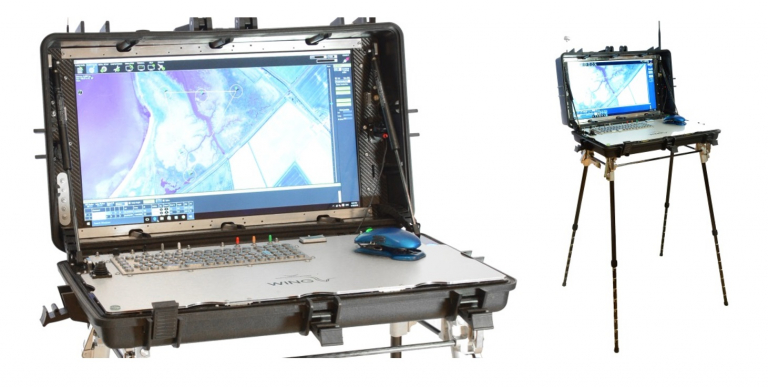
The Wing GCS is designed to be a comprehensive set of ground or shore-based systems for UAVs, ROVs in a single portable unit. Built around the patented Wing control device it enables manual piloting and mission planner editing with one hand. The other hand is free to operate aircraft systems and camera gimbal through the keyboard and secondary joystick.
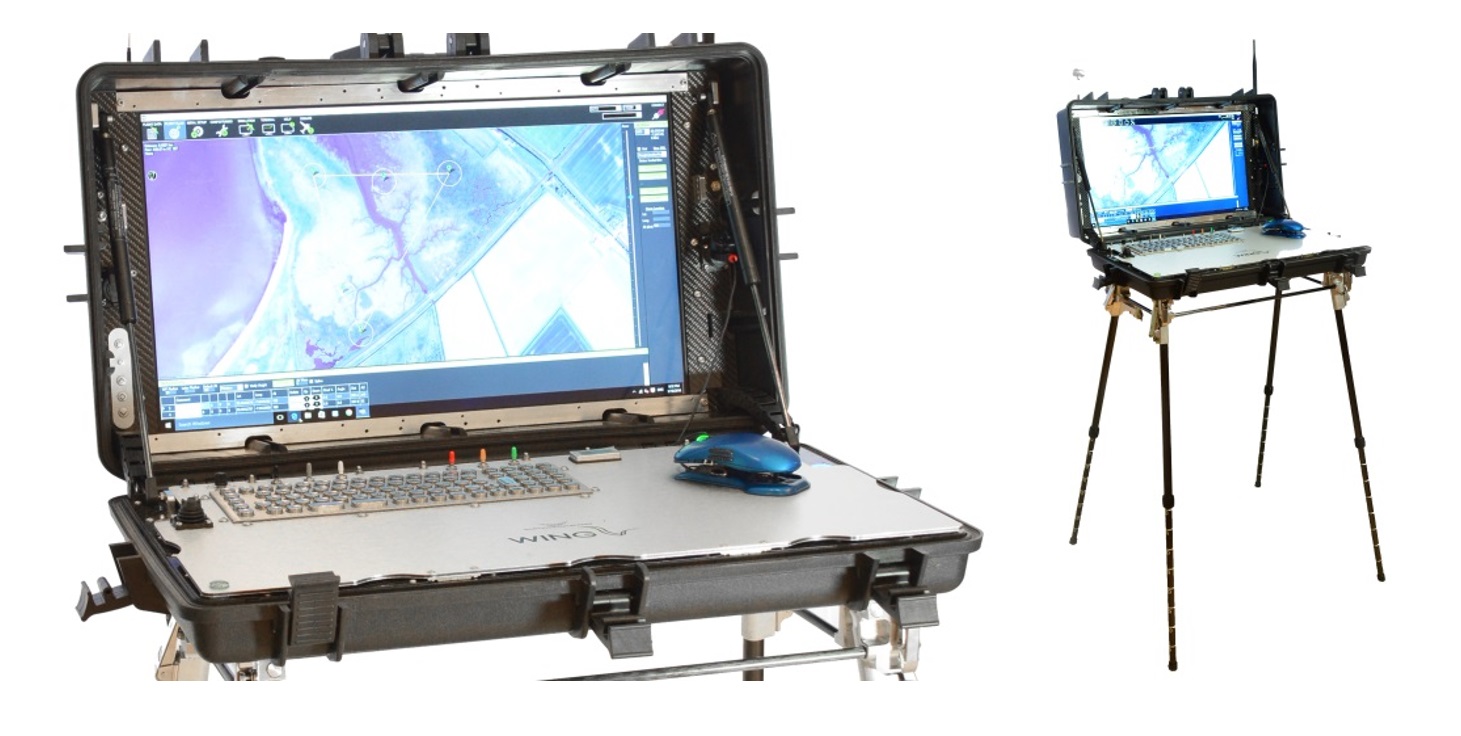
The Wing GCS screen and control console (left) and fitted to the leg assembly (right). Copyright: Worthington Sharpe
It is expected that a new model of the Wing GCS will be available for the competition itself but the features and specifications will be similar to the current system. Worthington Sharpe would welcome suggestions as to additional features that would be useful. The specifications are likely to be as follows:
- Wing Control Device
- Fully-featured outdoor workstation
- Outdoor viewable 24” (1920x1080), TFT LCD, LED Backlight 1000nits, wide viewing angle
- User configurable component bay
- Easy integration with telemetry (Pixhawk, DJI, etc)
- Integrated foldable legs
- Dimensions (closed) 680mm x 430mm x 190mm
- 16.5kg total weight
- Energy: Lithium polymer battery, 12V 22Ah, 4-hrs typical operating time.
- Communications: 4x SMA connections suitable for standard telemetry systems.
- In-built Intel NUC computer with the following features:
- 2x Arial mountings. 6x USB ports (2 used), 1x Ethernet.
- Supplied with Windows 10 operating system suitable for Mission Planner, DJI Ground Station or custom software.
For detailed information of the Wing GCS see http://www.worthingtonsharpe.com/gcs.html
The Wing control device is central to the system. It combines full 3D control with the precision of a laser mouse.

Wing Control Device. Copyright: Worthington Sharpe
The interface with the Wing is through a single standard USB port but it is recognised as two separate devices: A standard mouse; and a standard 4-axis joystick. This means that it works directly with ground stations programs such as Mission Planner or QGround Control and that it is straightforward to program custom software to use the Wing.
The mouse and joystick functions of the Wing, and the secondary joystick and other features of the Wing GCS provide a single system that can be used for control of vehicles in all domains.
For further details please refer to http://www.worthingtonsharpe.com/functions.html
UAVs
Mouse and keyboard functions are available for operating the mission planner and rapidly and precisely defining waypoints. Pitch, Roll, Yaw are simultaneously available for manual aircraft piloting and a mode-switch changes the scroll wheel so it operates as a joystick throttle. The secondary joystick is also available for camera gimbal control.
ROVs
An arrangement is similar to UAV control with the secondary joystick used for surge and sway control and the scroll-wheel for heave. The mouse functions are available for systems operations or for control of the manipulator arm as discussed below.
Ground Vehicles with Manipulator Arm
In this scenario we recommend that the secondary joystick is used for vehicle control and the Wing’s mouse functions are mapped to control the manipulator arm in the X-Y plane and the scroll wheel for control in the Z-direction. The pitch, roll and yaw functions are available for tool end-effector orientation. Worthington Sharpe are planning a more sophisticated control methodology but it is unlikely this will be available in time for the ERL competition. A document discussing the proposed methodology can be sent on request as background information.
Application Procedure
The teams applying for loan equipment must be registered to participate in ERL Emergency Robots 2017 and must be able to build a two or three domain team.
The research centre or company teams must be within the European Union (EU).
The applicant teams are required (deadline 30 June 2017):
- To be registered to participate in ERL Emergency Robots 2017.
- To be within the European Union (EU).
- To send a text document containing the following :
- Contact information of the team leader (member responsible for the communications with the consortium). For university teams, contact information of an academic supervisor should also be provided.
- Executive Summary of the application (max 1 page).
- Description of the motivations leading the team to ask for the loan.
- Description of the team expertise:
- Detailed description of specialties and expertise of the team, past achievements (past research projects in which team members have been involved), etc.
- CVs of the team members (max 1 page for each CV).
- Description of how the team wants to fulfill the scenarios:
- Which scenarios the team plans to participate in. The team has to describe in detail how the team plans to fulfill the different tasks and how the borrowed object can be useful for that; the intended algorithms that will be used.
- Planned matching strategy to form the multi-domain team. Has the team already searched for other domain partner teams?
- Financial Summary of the team (1 page on income and expenditure)
The application paper must be provided in electronic format (pdf preferred). The format shall be printable on A4 sheets, margins of at least 25mm all sides, 10 point font or larger.
All the material must be sent via e-mail to:
Fausto Ferreira
NATO Centre for Maritime Research and Experimentation
Viale S. Bartolomeo 400
19126 La Spezia, Italy
+39 0187 527 479
e-mail: Fausto.Ferreira@cmre.nato.int
Loaning procedure
The applications will be reviewed and the team granted loan equipment will be announced on the website in mid-April 2017. The Wing GCS system will be made available for loan in two stages:
Wing Control Device
Firstly, the Wing control device will be sent to the selected team once the loan arrangements have been agreed and will be returned to Worthington Sharpe at the end of the competition.
Wing GCS
Before the start of the competition, the complete Wing GCS will be made available until the end of the competition. Either the selected team could collect the Wing GCS from Worthington Sharpe (Lancashire, UK) or Worthington Sharpe can bring it to Piombino a few days before the competition starts.
The above arrangement will allow the team to complete development and testing of their systems with the Wing control device and a standard computer. A standard joystick and keyboard can be used to as direct substitutes to the secondary joystick and keyboard on the Wing GCS.
Before the competition starts, Worthington Sharpe will assist the team in fitting their telemetry systems to the Wing GCS, but this is a straightforward procedure. Note that the Wing GCS uses an Intel NUC computer as standard and it would reduce the chance of problems if the team buys their own Intel NUC for development of testing, then this can be fitted directly to the Wing GCS. If a different computer is used (maybe Linux or Android), that should be fine but the details would need to be discussed with Worthington Sharpe to ensure it meets size and compatibility requirements.
Selection criteria
The team will be selected on the basis of the quality of the presented application paper (quality and degree of innovation of the proposed algorithms, expertise of the teams, etc.).
Loan contract and required insurance
Once the team who will receive loan equipment has been selected, a loan contract will be signed between Worthington Sharpe Ltd and the selected end-user. ERL consortium will not be a party of the contract and will not be held responsible for any contract breach from either sides.
Via the loan contract the end-user will undertake to accept full responsibility for returning the items in good condition at the end of the ERL Emergency Robots 2017 competition or upon the request of Worthington Sharpe Ltd. This includes a commitment to cover the costs of any repair or damage, up to full replacement following complete loss of the equipment.
Because of this it is mandatory that the end-user obtains insurance to cover the risks of damage or loss of the equipment.
The cost of the items can be quantified as Wing CGS (cost €10,200).
Details about the loan contract/insurance will be given to the selected team.
Concluding remarks
For information and updates on this call please check this website.
For further information contact:
Fausto Ferreira
NATO Centre for Maritime Research and Experimentation
Viale S. Bartolomeo 400
19126 La Spezia, Italy
+39 0187 527 479
e-mail: Fausto.Ferreira@cmre.nato.int