Functionalities
Object Perception
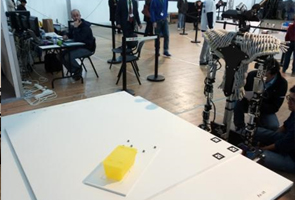 |
The objective of this functionality benchmark is to assess the capabilities of a robot in processing sensor data in order to extract information about observed objects from a given list. It requires the robot to detect the object's presence, estimate their class, identity and location. |
Object Manipulation
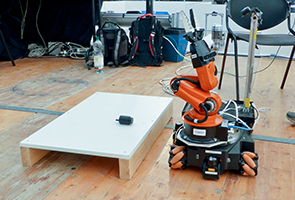 |
The robot must be capable of controlling the manipulator motion based on its own visual perception. |
Control
 |
This functional benchmark will test the team's ability to move their robot's manipulator in a well-controlled manner, following a spline on a given trajectory as accurately as possible. |
Navigation
 |
This functionality benchmark assesses the robot's capability to visit a sequence of way points without colliding with obstacles and reaching its target within reasonable time. |